หน่วยความจำภายใน (Internal
Memory) หรือ หน่วยความจำหลัก (Main
Memory Unit) จะอยู่ภายในตัวเครื่อง จะทำงานเชื่อมต่อกับหน่วยประมวลผลกลางและหน่วยประมวลผลกลางสามารถใช้งานได้โดยตรงหน่วยความจำชนิดนี้จะเก็บข้อมูลและชุดคำสั่งในระหว่างการประมวลผลและมีกระแสไฟฟ้าสารกึ่งตัวนำหน่วยความจำชนิดนี้มีขนาดเล็กราคาถูกและสามารถให้หน่วยประมวลผลกลางนำข้อมูลมาเก็บและเรียกค้นได้อย่างรวดเร็วหน่วยความจำของคอมพิวเตอร์ประกอบด้วยวงจรอิเล็กทรอนิกส์ที่รับและส่งสัญญาณไฟฟ้าในรูปแบบของรหัส
ความจุไม่ใหญ่มากนัก โดยมีหน้าที่สำคัญ คือ เรียกใช้และเก็บชุดคำสั่งต่างๆ
ที่ใช้ในการประมวลจากหน่วยความจำสำรอง
-
เก็บข้อมูลที่รับมาจากหน่วยรับข้อมูลเพื่อส่งไปยังหน่วยประมวลผลกลาง
-
เก็บผลลัพธ์ที่ได้ในขณะประมวลผลแต่ยังไม่ใช่ผลลัพธ์ที่ต้องการ
-
เก็บผลลัพธ์ที่ได้จากการประมวลผลที่เป็นผลลัพธ์ที่ต้องการเพื่อเตรียมส่งไปยังหน่วยแสดงผล
หน่วยความจำหลักแบ่งตามสภาพการใช้งานเป็น 2 ประเภท แบ่งออกเป็น
1. ROM
(Read Only memory) (หน่วยความจำอ่านอย่างเดียว) หมายถึง เป็นหน่วยความจำแบบสารกึ่งตัวนำชั่วคราวชนิดอ่านได้อย่างเดียว
ใช้เป็นสื่อบันทึกในคอมพิวเตอร์ เพราะไม่สามารถบันทึกซ้ำได้ (อย่างง่ายๆ) เป็นหน่วยความจำที่มีซอฟต์แวร์หรือข้อมูลอยู่แล้ว
และพร้อมที่จะนำมาต่อกับไมโครโพรเซสเซอร์ได้โดยตรง
หน่วยความจำประเภทนี้แม้ไม่มีไฟเลี้ยงต่ออยู่ ข้อมูลก็จะไม่หายไปจากหน่วยความจำ (nonvolatile)
โดยทั่วไปจะใช้เก็บข้อมูลที่ไม่ต้องมีการแก้ไขอีกแล้ว
เช่น
-
เก็บโปรแกรมไบออส (Basic ผลผลิตป้อนข้อมูลของระบบ: BIOS)
หรือเฟิร์มแวร์
ที่ควบคุมการทำงานของคอมพิวเตอร์
-
ใช้เก็บโปรแกรมการทำงานสำหรับเครื่องคิดเลข
-
ใช้เก็บโปรแกรมของคอมพิวเตอร์ที่ทำงานเฉพาะด้าน เช่น
ในรถยนต์ที่ใช้ระบบคอมพิวเตอร์ควบคุมวงจร ควบคุมในเครื่องซักผ้า เป็นต้น
หน่วยความจำประเภท ROM นี้ยังแบ่งออกเป็นประเภทย่อยๆ
ตามลักษณะการใช้งานได้หลายประเภท สำหรับเทคโนโลยีในการผลิตตัวไอซีที่ทำหน้าที่เป็น
ROM มีทั้งแบบ MOS และแบบไบโพลาร์ ดังแผนภาพ
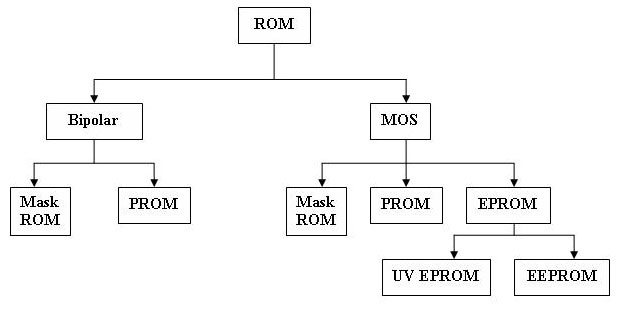
ชนิดของ ROM
-
รอมหน้ากาก
หน่วยความจำประเภทนี้
ข้อมูลทั้งหมดที่อยู่ภายในจะถูกโปรแกรมมาจากโรงงานตั้งแต่ขั้นตอนการผลิตไอซี
เราจะใช้ ROM ชนิดนี้
เมื่อข้อมูลนั้นไม่มีการเปลี่ยนแปลง และเหมาะสำหรับงานที่ผลิตครั้งละมากๆ
ผู้ใช้ไม่สามารถ เปลี่ยนแปลงข้อมูลภายใน ROM ได้ ROM ประเภทนี้มีทั้งแบบไบโพลาร์และแบบ MOS
-
PROM (Programmable ROM)
จากไอซี ROM แบบแรกการโปรแกรมข้อมูลจะต้องโปรแกรมมาจากโรงงาน
และต้องผลิตจำนวนมากจึงจะคุ้มค่ากับต้นทุนในการผลิต
อีกทั้งโรงงานผู้ผลิตไอซีจะรู้ข้อมูลที่เก็บอยู่ด้วย
สำหรับระบบดิจิตอลหรือคอมพิวเตอร์ที่ผลิตออกมาจำนวนไม่มากและต้องการใช้หน่วยความจำ
ROM สามารถนำหน่วยความจำ
ROM มาโปรมแกรมเองได้
โดยหน่วยความจำนี้จะเรียกว่า PROM ( Programmable Read Only Memory
) หน่วยความจำประเภทนี้
เซลล์เก็บข้อมูลแต่ละเซลล์จะมีฟิวส์ ( fused ) ต่ออยู่
เป็นหน่วยความจำที่ข้อมูลที่ต้องการโปรแกรมจะถูกโปรแกรมโดยผู้ใช้เอง
โดยป้อนพัลส์แรงดันสูง ( HIGH VOLTAGE PULSED ) ไอซี PROM ที่ยังไม่ถูกโปรแกรมนั้น
ข้อมูลทุกเซลล์หรือทุกบิตจะมีค่าเท่ากันหมด คือ มีลอจิกเป็น 1
แต่เมื่อได้มีการโปรแกรมโดยป้อนแรงดันไฟสูงๆเข้าไปจะทำให้เซลล์บางเซลล์ฟิวส์ขาดไป
ทำให้ตำแหน่งที่เซลล์นั้นต่ออยู่มีลอจิกเป็น 0 เมื่อ PROM
ถูกโปรแกรมแล้ว
ข้อมูลภายใน จะไม่สามารถเปลี่ยนแปลงได้อีก
เนื่องจากฟิวส์ที่ขาดไปแล้วไม่สามารถต่อได้ หน่วยความจำชนิดนี้
จะใช้ในงานที่ใช้ความเร็วสูง ซึ่งความเร็วสูงกว่า
หน่วยความจำที่โปรแกรมได้ชนิดอื่นๆ
-
EPROM (Erasable Programmable ROM)
หน่วยความจำประเภท EPROM
เป็นหน่วยความจำประเภท
PROM ที่สามารถลบข้อมูลหรือโปรแกรมข้อมูลใหม่ได้
เหมาะสำหรับงานสร้างวงจรต้นแบบที่อาจต้องมีการแก้ไขโปรแกรมหรือข้อมูลใหม่
ข้อมูลจะถูกโปรแกรม โดยผู้ใช้โดยการให้สัญญาณ ที่มีแรงดันสูง ( HIGH
VOLTAGE SIGNAL ) ผ่านเข้าไปในตัว
EPROM ซึ่งเป็นวิธีเดียวกับที่ใช้ใน PROM หน่วยความจำประเภทนี้มี 2 ประเภท คือ
ประเภทที่ลบข้อมูลด้วยรังสีอัลตราไวโอเลต หรือที่เรียกกันว่า UV
PROM ส่วนอีกประเภทหนึ่งเป็นหน่วยความจำที่ลบข้อมูลด้วยไฟฟ้า
เรียกว่า EEPROM ย่อมาจาก Electrical Erasable PROM
หน่วยความจำประเภท UV
PROM การโปรแกรมทำได้โดยการป้อนค่าแรงดันไฟฟ้าที่เหมาะสมเข้าไป
และข้อมูลจะถูกบันทึกไว้ตลอดไป
สำหรับการลบข้อมูลทำได้ด้วยการฉายแสงอัลตราไวโอเลตเข้าไปในตัว ไอซี
โดยผ่านทางช่องใสที่ทำด้วยผลึกควอตซ์ที่อยู่บนตัวไอซี เมื่อฉายแสงครู่หนึ่ง (
ประมาณ 5 - 10 นาที ) ข้อมูลที่อยู่ภายในก็จะถูกลบทิ้ง
ซึ่งช่วงเวลาที่ฉายแสงนี้สามารถดูได้จากข้อมูลที่กำหนด ( DATA
SHEET ) มากับตัว EPROM
หน่วยความจำประเภท EEPROM
แม้ว่าจะลบและโปรแกรมข้อมูลได้ด้วยกระแสไฟฟ้าซึ่งสะดวกในการใช้งาน
แต่ความเร็วในการอ่าน และเขียนข้อมูลจะไม่เร็วเท่าที่ควร
การอ่านขนาดความจุจาก Data Sheet
จากรูปด้านบน
แสดงให้เห็นส่วนประกอบพื้นฐานของ ROM ซึ่งจะมีสัญญาณต่างๆ
ที่เกี่ยวข้องกับ ROM และทุกชิปที่อยู่ใน
ROM มักมีการจัดแบ่งแยกหน้าที่เสมอ
เช่น ขาแอดเดรสของ ROM เป็นอินพุต ส่วนขาข้อมูลจะเป็นเอาต์พุต
โดยหลักการแล้วขาข้อมูลจะต่อเข้ากับบัสข้อมูลซึ่งเป็นบัส 2 ทาง
ลักษณะโครงสร้างภายในของข้อมูลในหน่วยความจำสามารถดูได้จาก Data
Sheet ของ ROM นั้นๆ เช่น ROM ที่ระบุเป็น 1024
8 หรือ 4096
8 ตัวเลขชุดแรก
(1024,4096) จะบอกถึงจำนวนตำแหน่งที่ใช้เก็บข้อมูลภายใน ส่วนตัวเลขชุดที่สอง ( 8,8
) จะเป็นตัวบอกถึงจำนวนบิตของข้อมูลแบบขนานที่อ่านจาก
ROM
-
ในการที่จะกำหนดจำนวนเส้นของบัสแอดเดรสที่ใช้กับ ROM จะสามารถรู้ได้จาก
-
2 ยกกำลัง x = จำนวนแอดเดรสที่อ้างถึง
เช่น 2 ยกกำลัง x =
4096 จะได้ x =
12 ซึ่งก็คือ
จำนวนเส้นบัสแอดเดรสนั่นเอง
การอ่านข้อมูลจาก ROM
1.
CPU จะส่งแอดเดรสไปให้
ROM แอดเดรสดังกล่าวจะปรากฏ
เป็นแอดเดรสที่ต้องการอ่าน ใน ROMโดยข้อมูลจะถูกอ่านออกมาเพียงครั้งละ
1 ไบต์เท่านั้น
2.
CPU จะต้องให้ช่วงเวลาของการส่งแอดเดรสยาวนานพอประมาณ
( Wait State ) เรียกว่า Access Time โดยปกติแล้วจะต้องใช้เวลาประมาณ 100 - 300 นาโนวินาที ซึ่งขึ้นอยู่กับชนิดของ ROM ซึ่ง ROM จะใช้เวลานั้นในการถอดรหัสแอดเดรส
ของข้อมูลที่ต้องการจะอ่านออกมาที่เอาต์พุตของ ROM ซึ่งถ้าใช้เวลาเร็วกว่านั้น ROM จะตอบสนองไม่ทัน
3.
CPU จะส่งสัญญาณไปทำการเลือก
ROM เรียกว่า
สัญญาณ CS (Chip Select) เพื่อบอกว่าต้องการเลือก ROM ซึ่งเป็นการส่งสัญญาณเพื่อยืนยันการเลือกชิปนั่นเอง
4.
ข้อมูลจะผ่านออกทางขาข้อมูลชั่วขณะจังหวะการเลือกชิป
และเมื่อขาการเลือกชิปไม่แอคทีฟ ข้อมูลก็จะเข้าสู่ภาวะที่มีอิมพีแดนซ์สูง
- RAM (Random access memory) หมายถึง หน่วยความจำหลักที่จำเป็น หน่วยความจำ
ชนิดนี้จะสามารถเก็บข้อมูลได้
เฉพาะเวลาที่มีกระแสไฟฟ้าหล่อเลี้ยงเท่านั้นเมื่อใดก็ตามที่ไม่มีกระแสไฟฟ้า
มาเลี้ยง ข้อมูลที่อยู่ภายในหน่วยความจำชนิดจะหายไปทันที หน่วยความจำแรม ทำหน้าที่เก็บชุดคำสั่งและข้อมูลที่ระบบคอมพิวเตอร์กำลังทำงานอยู่ด้วย
ไม่ว่าจะเป็นการนำเข้าข้อมูล (Input) หรือ การนำออกข้อมูล (Output)
โดยที่เนื้อที่ของหน่วยความจำหลักแบบแรมนี้ถูกแบ่งออกเป็น
4 ส่วน คือ
1. Input Storage Area เป็นส่วนที่เก็บข้อมูลนำเข้าที่ได้รับมาจากหน่วยรับข้อมูลเข้าโดย
ข้อมูลนี้จะถูกนำไปใช้ในการประมวลผลต่อไป
2. Working Storage Area เป็นส่วนที่เก็บข้อมูลที่อยู่ในระหว่างการประมวลผล
3. Output Storage Area เป็นส่วนที่เก็บผลลัพธ์ที่ได้จากการประมวลผล
ตามความต้องการของผู้ใช้ เพื่อรอที่จะถูกส่งไปแสดงออก
ยังหน่วยแสดงผลอื่นที่ผู้ใช้ต้องการ
4. Program Storage Area เป็นส่วนที่ใช้เก็บชุดคำสั่ง
หรือโปรแกรมที่ผู้ใช้ต้องการจะส่งเข้ามา เพื่อใช้คอมพิวเตอร์ปฏิบัติตามคำสั่ง
ชุดดังกล่าว หน่วยควบคุมจะทำหน้าที่ดึงคำสั่งจากส่วน นี้ไปที่ละคำสั่งเพื่อทำการแปลความหมาย
ว่าคำสั่งนั้นสังให้ทำอะไร จากนั้นหน่วยควบคุม
จะไปควบคุมฮาร์ดแวร์ที่ต้องการทำงานดังกล่าวให้ทำงานตามคำสั่งนั้นๆ
ความเร็วของ RAM คิดกันอย่างไร
ที่ตัว Memorychip
จะมี เลขรหัส
เช่น HM411000-70 ตัวเลขหลัง (-) คือ ตัวเลขที่บอก ความเร็วของ RAM ตัวเลขนี้ เรียกว่า Accesstime
คือ
เวลาที่เสียไป ในการที่จะเข้าถึงข้อมูล หรือ เวลาที่แสดงว่า ข้อมูลจะถูก
ส่งออกไปทาง Data busได้เร็วแค่ไหน ยิ่ง Access time น้อยๆ แสดงว่า RAM ตัวนั้น เร็วมาก
ตารางค่า Access time บน Chip
เวลาในการเข้าถึง
(NS)
|
ตัวเลขที่พบบน
Memory chip
|
250
|
25
|
200
|
20
|
150
|
15
|
120
|
12
|
100
|
10
|
85
|
85
|
80
|
8.80
|
70
|
7.70
|
65
|
65
|
60
|
6.60
|
53
|
53
|
ความเร็วของ
RAM เรียกว่า Cycle
time ซึ่งมีหน่วยเป็น
ns โดย Cycle
time เท่ากับ Read/Write
cycle time (เวลาที่ในการส่งสัญญาณติดต่อ
ว่าจะอ่าน/เขียน RAM) รวมกับ Access
time และ Refresh
time
โดยทั่วไป
RAM จะต้องทำการตอบสนอง
CPU ได้ในเวลา 2
clock cycle หรือ 2 คาบ หาก RAM ตอบสนองไม่ทัน RAM จะส่งสัญญาณ /WAIT
บอก CPU ให้ คอย คือ การที่ CPU เพิ่ม clock
cycle ซึ่งช่วงเวลานี้เรียกว่า
WAIT STATE
วิธีที่ใช้ในการแก้ไข WAIT STATE
1. เทคนิค INTERLEAVE
เทคนิคนี้เป็นการลดปัญหาเรื่อง
Refresh time เพราะในการทำงานของ RAM จะเห็นว่าใน การติดต่อกับ Memory
1 address จะใช้เวลา 1
cycle time ในการที่ CPU ติดต่อ กับ Memory
ในแต่ละครั้ง
จะติดต่อเป็น block คือ หลาย Address เรียงต่อกัน จากความจริง ข้อนี้ เทคนิคการ Interleave
จึงเกิดขึ้น
โดยหลักการที่จะทำให้ Cycle time เหลื่อมกันเกิดจน Cycle time ใหม่ที่แคบลง
การสลับ
Bank ของ Memory
โดย Bank
บล็อกหนึ่งจะมี
Memory address เป็นเลขคี่ อีก Bank จะเป็นเลขคู่ เวลา CPU ติดต่อสลับไปสลับมาใน 2
Bank เพราะฉะนั้นต้องใส่
Memory ให้เต็ม Bank เป็นจำนวนคู่
เช่น 2 Bank หรือ 4 Bank ถ้า Memory ขนาดเท่ากัน คนที่ใส่ Memory ทั้งหมดไว้ใน Bank
เดียว
จะทำงานได้ช้ากว่า คนที่แบ่ง Memory ใส่เป็น 2
Bank แต่ Bank
ก็จะ
เหลือน้อยด้วย
2. วิธีการ Page Mode
วิธีการนี้จะต้องใช้
RAM พิเศษ คือ Paged
RAM โดย Memory
จะถูกมองว่า
แบ่ง เป็นกลุ่ม หรือ Page หลาย Page
ในการติดต่อกับ
Memory ที่ Address อยู่ใน Page เดียวกัน ต่อๆ
ไป โดยไม่ต้องมี Wait State แต่ถ้ามีการติดต่อกับ Page อื่น จะมี Wait
State เหมือนเดิม
3. หน่วยความจำหน่วยความจำแคช
ส่วนนี้จะถูกรวมกับ CPU ซึ่งก็คือ Internal
Cache แต่ถ้าเอามาติดบนเมนบอร์ด
จะเรียกว่า External Cache ก็คือ RAM นั่นเอง
แต่ความเร็วจะสูงมาก ทำให้ไม่มีภาวะ Wait State วิธีการก็คือ พยายามให้ CPU ติดต่อกับ Cache
ซึ่งเป็น SRAM
ความเร็วสูงก่อน
เพราะ ไม่มีภาวะ WaitState โดยจะมีวงจร Cache controller ซึ่งเป็น ตัวจัดการ Cache โดยมันจะตัด บล็อกข้อมูลจาก main
memory ประมาณบล็อกละ 2-4
KB มาใส่ไว้ใน Cache
พอ CPU ติดต่อ Memory
ก็จะมาดูใน Cache
ก่อนว่ามีข้อมูลที่ต้องการหรือไม่
ถ้าไม่มีก็จะไปเอาจาก Main memory ความสำคัญของ Cache คือ การตัดบล็อกมาให้ถูกตามความต้องการของ CPU โดย Cache
controller จะใช้วิธีการ Random
แต่ Random
อย่างมีหลักการ
คือ CPU มักต้องการ
ข้อมูลที่ต่อเนื่องกัน เพราะฉะนั้น Cache จะตัดข้อมูลบล็อกถัดไปมาเก็บไว้ การ Random
แบบนี้ให้ความแม่นยำถึง
80% ทีเดียว คือ
ไม่มีภาวะ Wait State เป็นเวลา 80% ของเวลาที่ใช้
ทำงานทั้งหมด
การตรวจสอบความเท่าเทียมกัน
การเช็ค
Parity เป็นการ เพิ่มบิตพิเศษเข้าไปอีก 1 บิต ให้กับทุกๆ 8 บิต ของข้อมูล จนกลายเป็น 9 บิต บิตที่เพิ่มขึ้นไม่ใช่ข้อมูล
แต่ใส่เพื่อตรวจสอบว่า ข้อมูลมีความผิดพลาดหรือไม่
โดยใช้หลักการนับขำนวนบิตข้อมูลที่มีค่าเป็น 1 ในทุกๆ 8 บิต การเข็ค Parity
นี้แบ่งได้ 2 วิธี คือ Odd
Parity (Parity คี่) และ Even
Parity (Parityคู่)
สำหรับวิธี
Odd Parity จะทำการนับจำนวนบิตที่เป็น 1 ใน 8 บิตว่ามีจำนวนเป็นคู่ หรือเป็นคี่
โดยมี IC 74LS280 ทำหน้าที่เป็นตัวสร้าง Parity และ เป็นตัวตรวจสอบ ถ้า 74LS280 นับจำนวน 1 ใน 8 บิตได้ เป็นจำนวนคู่ที่ Parity
bit จะถูกเซ็ตให้เป็น
1
เพื่อให้จำนวนของ 1 ใน 9 บิต (รวม Parity
bit ด้วย)
เป็นจำนวนคี่ แต่ถ้านับจำนวนของ 1 ใน 8 บิต ได้เป็นเลขคี่ Parity
bit จะถูกเซ็ตให้เป็น
0
เพื่อให้จำนวนของ 1ใน 9 บิต รวมเป็นเลขคี่ ถ้าวิธ ีEven
Parity ก็จะทำใน
ทางกลับกัน คือพยายามเซ็ต Parity ให้จำนวนของ 1 ใน 9 บิตเป็นจำนวนคู่
Parity
bit จะถูกสร้างตอน
เขียนข้อมูลลงใน RAM และจะถูกตรวจสอบ
เมื่อมีการ อ่านข้อมูลจาก RAM เช่น
ถ้าข้อมูลเป็น 11001010 ด้วยวิธี Odd Parity จะ เซ็ต Parity bit เป็น 1
แต่ถ้าตอนอ่านข้อมูลเกิดการเปลี่ยนแปลงเป็น 10001010 โดย Odd Parity ยังคงเป็น 1 ก็จะแสดง ว่ามีการผิดพลาดเกิดขึ้น IC
74LS280
จะทำการสร้างสัญญาณไปบอกให้ CPU เกิดการ Halt
และแสดงข้อความรายงานทางหน้าจอในแบบต่างๆ
เช่น PARITY ERROR SYSTEM HALT
ข้อเสียของการใช้
Parity bit คือ เสียเวลา และไม่ได้ประโยชน์เท่าไรนัก เพราะไม่
สามารถบอกได้ว่าผิดที่ตำแหน่งไหน และแก้ไขข้อผิดพลาดไม่ได้
บอกได้แค่ว่ามีความผิดพลาด เกิดขึ้นเท่านั้น ยิ่งกว่านั้น ถ้าสมมติ
ข้อมูลเกิดผิดพลาดทีเดียว 2 บิต เช่น 10001001 เปลี่ยนเป็น 10101011 เราก็ไม่สามารถเช็คข้อผิดพลาดโดยใช้วิธี
Parity ได้
ประเภทของ RAM
1.
DIP (Dual In-line Package) เป็นแบบพื้นฐานที่ใช้กัน เพราะ DIP คือ RAM ที่อยู่ในรูปแบบของ IC
(Integrate Circuit ) หรือ Memory chip การใช้งาน หรือติดตั้ง RAM ชนิดนี้ทำได้โดยการติดลงบน
ซ็อคเก็ตของ DIP เท่าที่เมนบอร์ดเตรียมไว้ให้
นั่นหมายความว่า ยิ่งความต้องการติด DIP มากๆ
เมนบอร์ดก็ต้องมีซ็อคเก็ตไว้ให้มากๆ ผลก็คือ ใช้พื้นที่เปลือง
และทำให้เมนบอร์ดใหญ่มาก ในการติด DIP ยังต้องระมัดระวังด้วย เพราะ Pin บอบบาง งอง่าย หักง่าย ทั้งยัง
เสียเวลาในการติด
2.
SIPP (Single In-line Pin Package) จะลดความยุ่งยากของการติดตั้ง RAM แบบ DIP ลง โดยติดลงบนแผ่น PCB
(Printed Circuit Board) ซะก่อน SIPP เป็นแผ่น PCB ที่มี Pin ซึ่งเหมือนขาของ IC แต่ Pin ของ SIPP จะมีเพียงแถวเดียวเรียงไปตามแนวยาวของแผ่น
PCB การติดตั้ง SIPP
ที่มีลักษณะเป็นรูกลมเรียงหนึ่งเป็นแถวยาวมีจำนวนรูเท่ากับ
Pin ของ SIPP
พอดี
ประหยัดเนื้อที่บนเมนบอร์ด และติดตั้งง่ายกว่า DIP มาก
3.
SIMM (Single In-line Memory Module) รูปร่างหน้าตา จะคล้ายกับ SIPP แต่ต่าง ส่วนที่จะต่อกับ
ซ็อคเก็ตบนเมนบอร์ด จาก Pin เป็นแบบ Edge
Connector คือเป็น
ลายวงจรเรียง กันเป็นซี่ตามขอบของ PCB ในแนวยาว ลักษณะเหมือนกับ
ที่เห็นตามการ์ดต่างๆ แต่ในการติดตั้ง SIMM จะไม่ใช้การเสียบลงไปตรงๆ
เหมือนการ์ดทั่วไป แต่จะเสียบลงแบบเอียงๆแล้วดันSIMM ไปด้านข้างเพื่อให้
กลไกบนซ็อคเก็ตทำการล็อก SIMM เอาไว้ การใช้ Edge
connector ในSIMM
ก็เพื่อตัดปัญหาเรื่องหน้าสัมผัสของ
Pin กับซ็อคเก็ต
SIMM
ที่ถูกผลิตออกมาจะแบ่งได้เป็นชนิดต่างๆ
ตามความกว้างของข้อมูลของ SIMM แต่ละโมดูล คือ
ชนิด 8 บิต, 16 บิต, 32 บิต การจัดวางลำดับของ Edge
connector จะมีมาตรฐาน
กลางที่ใช้กันอยู่
4.
DIMM (Dual In-line Memory Module) เป็น RAM ชนิดใหม่
และถูกกำหนด ให้เป็นมาตรฐานกลางโดย JEDEC (Joint Electron Device
Engineering Council) ลักษณะโดย ทั่วไป จะคล้าย SIMM แต่จะมี 168
Pin (ข้างละ 84
pin )
โมดูลของแรม
RAM
ที่เรานำมาใช้งานนั้นจะเป็น
chip เป็น ic ตัวเล็กๆ
ซึ่งส่วนที่เรานำมาใช้เป็นน่วยความจำหลัก จะถูกบัดกรีติดอยู่บนแผงวงจร หรือ Printed
Circuit Board เป็น Module
ซึ่งมีหลัก ๆ
อยู่ 2 Module คือ SIMM กับ DIMM
SIMM หรือเดี่ยวในสายโมดูลหน่วยความจำ
โดยที่ Module
ชนิดนี้
จะรองรับ datapath 32 bit โดยทั้งสองด้านของ circuit board จะให้สัญญาณ เดียวกัน
ความเป็นมาของ SIMM RAM
ในยุคต้น
ๆ ที่คอมพิวเตอร์เริ่มใช้งานกันอย่างแพร่หลายมากขึ้น
ซึ่งส่วนมากมักเป็นคอมพิวเตอร์ ระดับบุคคล (prosonal computer:PC) ใช้ซีพียู 8088 หรือ 80286 หน่วยความจำ DRAM
ถูกออกแบบให้
บรรจุอยู่ในแพคเกจแบบ DIP (dual in-line package) หรือที่เรียกว่าแบบตีนตะขาบเหมือนกับไอซีที่ใช้งานกันทั่วไป
การใช้งานหน่วยความจำแบบนี้ จึงต้องมีการจัดสรรพื้นที่มากพอสมควร บนเมนบอร์ด
ถ้าเคยเปิดฝาเรื่องดูภายในก็จะเห็นซ็อกเก็ตไอซีเหล่านี้ เรียงกันเป็นแถวเต็มไปหมด
การเพิ่มหน่วยความจำชนิดนี้ทำได้ง่าย
เพี่ยงแต่ซื้อ DRAM ตามขนาดความจุที่ต้องการมา
เสียบลงใน ซ็อกเก็ตที่เตรียมไว้
และทำการติดตั้งจั๊มเปอร์อีกบางตัวหรือบางเครื่องอาจเพียงตั้งค่าในซอตฟ์แวร์ ไบออส
(BIOS) ของเครื่องใหม่ เป็นอันเรียบร้อยใช้งานได้ทันที
ครั้งเมื่อเวลาผ่านไปเทคโนโลยีก้าวหน้าขึ้น
เทคนิคการแพคเกจชิพไอซีลงบนตัวถังทันสมัยมากขึ้น
และเป็นที่รู้จักกันดีกับเทคโนโลยี อุปกรณ์ติดพื้นผิว
ทำให้การติดตั้งหน่วยความจำหรือเพิ่มหน่วยความจำ ทำได้ยากขึ้นและต้องมีเครื่องมือเฉพาะ
จึงได้มีการคิดค้น วิธีการใหม่ โดยการนำเอาตัวไอซี DRAM แบบ
ติตั้งบนพื้นผิวไปติดบนแผงวงจรแผ่นเล็ก ๆ ก่อน
แล้วจึงเดินลายทองแดงต่อขาจากตัวไอซี DRAM ออกมา
และแยกเป็นขาเชื่อมต่อเอาไว้เมื่อต้องการจะติดตั้งก็นำเปเสียบลงในซ็อกเก็ตที่เตรียมไว้บนเมนบอร์ดได้ทันที
โมดูลหน่วยความจำแบบนี้มีชื่อเรียกว่า ซิพแรม (SIP RAM :
Single In-line Package RAM) แรมชนิดนี้จะมี 30 ขา
การพัฒนายังไม่หยุดเพียงเท่านี้
เพื่อความสะดวกในการใช้งานมากขึ้น จึงได้มีการออกแบบซ็อกเก็ต
สำหรับหน่วยความจำชั่วคราว แบบใหม่
โดยออกแบบในลักษณะคอนเน็กเตอร์ที่ส่วนของลายทองแดงบนแผ่น วงจรของซิพแรมโดยตรง
ทำให้สามารถตัดขาที่ยื่นออกมา จากตัวโมดูลได้
ดังนั้นจึงได้มีการตั้งชื่อเรียกใหม่ว่า แบบซิมแรม (SIMM
RAM : Single In-line Memory Module RAM) ซิพแรมมีขาต่อใช้งาน 30 ขา เช่นเดียวกับซิมแรม
และสัญญาณที่ต่อใช้งานแต่ละขาก็เหมือนกันด้วย
DIMM หรือคู่ในสายโมดูลหน่วยความจำ
โดย
Module นี้เพิ่งจะกำเนิดมาไม่นานนัก มี datapath ถึง 64 บิต โดยทั้งสองด้านของ circuite
board จะให้สัญญาณที่ต่างกัน
ตั้งแต่ CPU ตระกูล Pentium
เป็นต้นมา
ได้มีการออกแบบให้ใช้งานกับ datapath ที่มากว่า 32
bit เพราะฉะนั้น
เราจึงพบว่าเวลาจะใส่ SIMM RAM บน slot RAM จะต้องใส่เป็นคู่ ใส่โดด ๆ แผง เดียวไม่ได้
Memory
Module ปัจจุบันมีอยู่
3 รูปแบบคือ 30-pin,
72-pin, 168-pin ที่นิยมใช้ในเวลานี้คือ
168-pin
รายละเอียดของ RAM แต่ละชนิด
Parity
จะมีความสามารถในการตรวจสอบความถูกต้องของ
ข้อมูล โดยจะมี bit ตรวจสอบ 1 ตัว ถ้าพบว่ามีข้อมูลผิดพลาด
ก็จะเกิ system halt ในขณะที่แบบ Non-Parity จะไม่มีการตรวจสอบ bit นี้ Error Cheching
and Correcting (ECC) หน่วยความจำแบบนี้ ได้พัฒนาขึ้นมาอีกระดับหนึ่ง
เพราะนอกจากจะตรวจสอบว่ามีข้อมูลผิดพลาดได้แล้ว ยังสามารถแก้ไข bit ที่ผิดพลาดได้อีกด้วย โดยไม่ ทำให้ system
halt แต่หากมีข้อมูลผิดพลาดมาก
ๆ มันก็มี halt ได้เหมือนกัน
สำหรับ ECC นี้จะเปลือง overhead
เพื่อเก็บข้อมูล
มากว่าแบบ Parity ดังนั้น Performance ของมันจึงถูกลดทอนลงไปบ้าง
ชนิดและความแตกต่างของ RAM
หน่วยความจำแบบไดนามิกการเข้าถึงแบบสุ่ม (DRAM)
DRAM
จะทำการเก็บข้อมูลในตัวเก็บประจุ
(Capaciter) ซึ่งจำเป็นต้องมีการ refresh เพื่อ เก็บข้อมูล ให้คงอยู่โดยการ refresh
นี้ทำให้เกิดการหร่วงเวลาขึ้นในการเข้าถึงข้อมูล
และก็เนื่องจากที่มันต้อง refresh ตัวเองอยู่ตลอดเวลานี้เองจึงเป็นเหตุให้ได้ชื่อว่า Dynamic
RAM
Staic Random Access หน่วยความจำ (SRAM)
จะต่างจาก
DRAM ตรงที่ว่า DRAM
ต้องทำการ refresh
ข้อมูลอยู่ตลอดเวลา
แต่ในขณะที่ SRAM จะเก็บข้อมูล
นั้น ๆ ไว้ และจำไม่ทำการ refresh โดยอัตโนมัติ ซึ่งมันจะทำการ refresh ก็ต่อเมื่อ สั่งให้มัน refresh
เท่านั้น
ซึ่งข้อดีของมันก็คือความเร็ว ซึ่งเร็วกว่า DRAM ปกติมาก แต่ก็ด้วยราคาที่สูงว่ามาก จึงเป็นข้อด้อยของมัน
โหมดหน้าอย่างรวดเร็ว DRAM (FPM DRAM)
FPM
นั้น
ก็เหมือนกับ DRAM เพียงแต่ว่า
มันลดช่วงการหน่วงเวลาขณะเข้าถึงข้อมูลลง ทำให้ มันมีความเร็วในการเข้าถึงข้อมูล
สูงกว่า DRAM ปกติ
ซึ่งโดยที่สัญญาณนาฬิกาในการเข้าถึงข้อมูล จะเป็น 6-3-3-3 (Latency
เริ่มต้นที่ 3
clock พร้อมด้วย 3
clock สำหรับการเข้าถึง
page) และสำหรับ ระบบแบบ 32 bit จะมีอัตราการส่งถ่ายข้อมูลสูงสุด 100
MB ต่อวินาที
ส่วนระบบแบ 64 bit จะมีอัตรา การส่งถ่ายข้อมูลที่ 200 MB ต่อววินาที เช่นกัน ปัจจุบันนี้ RAM ชนิดนี้แทบจะหมดไปจากตลาดแล้วแต่
ยังคงมีให้เห็นบ้าง และมักมีราคา ที่ค่อนข้างแพงเมื่อเที่ยบกับ RAM รุ่นใหม่ ๆ เนื่องจากที่ว่าปริมาณใน
ท้องตลาดมีน้อยมาก ทั้ง ๆ ที่ยังมีคนต้องการใช้แรมชนิดนี้อยู่
Extended-Data Output (EDO) DRAM
หรือเรียกอีกชื่อหนึ่งก็คือ Hyper-Page
Mode DRAM ซึ่งพัฒนาขึ้นอีกระดับหนึ่ง
โดยการที่มันจะอ้างอิง ตำแหน่งที่อ่านข้อมูล จากครั้งก่อนไว้ด้วย
ปกติแล้วการดึงข้อมูลจาก RAM ณ ตำแหน่งใด ๆ
มักจะดึงข้อมูล ณ ตำแหน่งที่อยู่ใกล้ ๆ จากการดึงก่อนหน้านี้ เพราะฉะนั้น
ถ้ามีการอ้งอิง ณตำแหน่งเก่าไว้ก่อน ก็จะทำให้ เสียเวลาในการเข้าถึงตำแหน่งน้อยลง
และอีกทั้งมันยังลดช่วงเวลาของ CAS latency ลงด้วย และด้วย ความสามารถนี้
ทำให้การเข้าถึงข้อมูลดีขึ้นกว่าเดิมกว่า 40% เลยทีเดียว
และมีความสามารถโดยรวมสูงกว่า FPM กว่า 15% EDO จะทำงานได้ดีที่ 66
MHzด้วย timming
5-2-2-2
และก็ยังทำงานได้ดีเช่นกัน แม้จะใช้งานที่ 83 MHz ด้วย Timming นี้และหากว่า chip
EDO นี้
มีความเร็วที่สูงมากพอ (มากว่า 50ns) มันจะ สามารถใช้งานได้ ณ 100
MHz ที่ Tomming
6-3-3-3 ได้อย่างสบาย
อัตราการส่งถ่ายข้อมูลสูงสุด ของ DRAM ชนิดนี้อยู่ที่ 264
MB ต่อวินาที EDO
RAM ในปัจจุบันนี้ไม่เป็นที่นิยมใช้แล้ว
Burst EDO (BEDO) DRAM
BEDO
ได้เพิ่มความสามารถขึ้นมาจาก
EDO เดิม คือ Burst
Mode โดยหลังจากที่มันได้
address ที่ ต้องการ adress แรกแล้วมันก็จะทำการ generate อีก 3 address ขึ้นทันที ภายใน 1 สํญญาณนาฬิกา ดังนั้น
จึงตัดช่วงเวลาในการรับ adress ต่อไป เพราะฉะนั้น Timming ของมันจึงเป็น 5-1-1-1 ณ 66 MHz BEDO ไม่เป็นที่แพร่หลาย
และได้รับความนิยมเพียงระยะเวลาสั้น ๆ เนื่องจากว่าทาง Intel
ตัดสินใจใช้ SDRAM
แทน EDO และไม่ได่ใช้ BEDO
เป็นส่วนประกอบในการพัฒนา
chipset ของตน ทำให้บริษัทผู้ผลิต ต่าง ๆ หันมาพัฒนา SDRAM
แทน
Synchronous DRAM (SDRAM) SDRAM
จะต่างจาก DRAM
เดิมตรงที่มันจะทำงานสอดคล้งกับสัญญาณนาฬิกา
สำหรับ DRAM เดิมจะ
ทราบตำแหน่งที่อ่าน ก็ต่อเมื่อเกิดทั้ง RAS และCAS ขึ้น
แล้วจึงทำการไปอ่านข้อมูลโดยมีช่วงเวลาในการ เข้าถึงข้อมูล
ตามที่เรามักจะได้เห็นบนตัว chip ของตัว RAM เลย เช่น -50,
-60, -80 โดย -50 หมายถึง ช่วงเวลาเข้าถึง ใช้เวลา 50 นาโนวินาทีเป็นต้น แต่ว่า SDRAM
จะใช้สัญญาณนาฬิกาเป็นตัวกำหนดการ
ทำงานโดยจะใช้ความถี่ของสัญญาณเป็นตัวระบุ SDRAM จะทำงานตามสัญญาณนาฬิกาขาขึ้นเพื่อรอรับ
ตำแหน่งข้อมูล ที่ต้องการให้มันอ่าน แล้วจากนั้นมันก็จะไปค้นหาให้
และให้ผลลัพธ์ออกมาหลังจากได้รับ ตำแหน่งแล้ว เท่ากับค่าของ CAS เช่น CAS 2 ก็คือ
หลังจากรับตำแหน่งที่อ่านแล้วมันจะให้ผลลัพธ์ออกมา ภายใน 2 ลูกของสัญญาณนาฬิกา SDRAM
จะมี Timming
เป็น 5-1-1-1 ซึ่งแน่ มันเร็วพอ ๆ กันกับ BEDO
RAM เลยที่เดียว
แต่ว่ามันสามารถทำงานได้ ณ 100 MHz หรือมากว่า และมีอัตราการส่งถ่าย
ข้อมูลสูงสุดที่ 528 MB ต่อวินาที
DDR SDRAM (หรือ SDRAM II)
DDR
RAM นี้แยกออกมาจาก
SDRAM โดยจุดที่ต่างกันหลัก ๆ ของทั้งสองชนิดนี้คือ DDR
SDRAM นี้สามารถที่จะใช้งานได้ทั้งขาขึ้น
และขาลง ขแงสัญญาณนาฬิกาเพื่องส่งถ่ายข้อมูล นั่นก็ทำให้อัตราส่งถ่าย
เพิ่มขึ้นได้ถึงเท่าตัว ซึ่งมีอัตราการส่งถ่ายข้อมูลสูสุดถึง 1 G ต่อวินาทีเลยทีเดียว
แรมบัส DRAM (RDRAM)
ชื่อของ
RAMBUS เป็นเครื่องหมายการค้าของบริษัท RAMBUS Inc. ซึ่งตั้งมาตั้งแต่ยุค 80 แล้ว เพราะฉะนั้นชื่อนี้
ก็ไม่ได้เป็นชื่อที่ ใหม่อะไรนัก โดยปัจจุบันได้เอาหลักการของ RAMBUS
มาพัฒนาใหม่
โดยการลด pin รวม static
buffer และทำการปรับแต่งทาง
interface ใหม่ DRAM ชนิดนี้
จะสามารถ ทำงานได้ทั้งขอบขาขึ้น และลงของสัญญาณนาฬิกา และเพียงช่องสัญญาณเดียว
ของหน่วยความจำ แบบ RAMBUS นี้ มี Performance มากกว่าเป็น 3 เท่า จาก SDRAM
100 MHz แล้ว
และเพียงแค่ช่อง สัญญาณเดียวนี้ก็มีอัตราการส่งถ่ายข้องมูลสูงถึง 1.6
G ต่อวินาที
ถึงแม้ว่าเวลาในการเข้าถึงข้อมูลแบบ สุ่มของ RAM ชนิดนี้จะช้า
แต่การเข้าถึงข้อมูลแบบต่อเนื่องจะเร็วมาก ๆ ซึ่งกาว่า RDRAM
นี้มีการพัฒนา Interface
และมี PCB
(Printed Circuit Board) ที่ดี ๆ แล้วละก็รวมถึง Controller ของ Interface ให้ สามารถใช้งานได้ถึง 2
ช่องสัญญาณแล้วมันจะมีอัตราการส่งถ่ายข้อมูลเพิ่มเป็น 3.2
G ต่อวินาที
และหากว่าสามารถใช้ได้ถึง 4
ช่องสัญญาณก็จะสามารถเพิ่มไปถึง 6.4 G ต่อวินาที
Synchronous Graphic RAM (SGRAM)
SGRAM
นี้ก็แยกออกมาจาก
SDRAM เช่นกันโดยมันถูกปรับแต่งมาสำหรับงานด้าน Graphics
เป็นพิเศษแต่โดยโครงสร้างของ
Hardware แล้ว แทยไม่มีอะไรต่างจาก SDRAM เลย เราจะเห็นจากบาง Graphic
Card ที่เป็นรุ่นเดียวกัน
แต่ใช้ SDRAM ก็มี SGRAM ก็มี เช่น Matrox G200 แต่จุดที่ต่างกัน ก็คือ ฟังก์ชัน ที่ใช้โดย Page
Register ซึ่ง SG สามารถทำการเขียนข้อมูลได้หลาย ๆ
ตำแหน่ง ในสัญญาณนาฬิกาเดียว ในจุดนี้ทำให้ความเร็วในการแสดงผล และ Clear
Screen ทำได้เร็วมาก
และยังสามารถ เขียนแค่ บาง bit ในการ word
ได้
(คือไม่ต้องเขียนข้อมูลใหม่ทั้งหมดเขียนเพียงข้อมูลที่เปลี่ยนแปลง เท่านั้น)
โดยใช้ bitmask ในการเลือก bit ที่จะเขียนใหม่สำหรับงานโดยปกติแล้ว
SGRAM แทบจะไม่ ให้ผลที่ต่างจาก SDRAM เลย มันเหมาะกับงานด้าน Graphics
มากกว่า
เพราะความสามารถที่ แสดงผลเร็วและ Clear Screen ได้เร็วมันจึงเหมาะกับใช้บน Graphics
Card มากกว่า
ที่จะใช้บน System
Video RAM (VRAM)
VRAM
ชื่อก็บอกแล้วว่าทำงานเกี่ยวกกับ
Video เพราะมันถูกออกแบบมาใช้บน Dispaly Card โดย VRAM นี้ก็มีพื้นฐานมาจาก DRAM
เช่นกัน
แต่ที่ทำให้มันต่างกันก็ด้วยกลไกการทำงานบางอย่าง ที่เพิ่มเข้ามา โดยที่ VRAM
นั้น จะมี serial
port พิเศษเพิ่มขึ้นมาอีก
1หรือ 2
port ทำให้เรามองว่ามันเป็น
RAM แบบ พอร์ทคู่ (Dual-Port)
หรือ ไตรพอร์ท
(Triple-Port) Parallel Port ซึ่งเป็น Standard Interface ของมัน จะถูกใช้ในการติดต่อกับ Host
Processor เพื่อสั่งการให้
ทำการ refresh ภาพขึ้นมาใหม่ และ Seral Port ที่เพิ่มขึ้นมา
จะใช้ในการส่งข้อมูลภาพออกสู่ Display
Windowns RAM (WRAM)
WRAM
นี้ ดู ๆ
ไปล้วเหมือนกับว่า ถูกพัฒนาโดย Matrox เพราะแทบจะเป็นผู้เดียวที่ใช้ RAM ชนิดนี้ บน Graphics
Card ของตน (card
ตระกูล Millenium
และ Millenium
II แต่ไม่รวม Millenium
G200 ซึ่งเป็น
ซึ่งใช้ SGRAM ) แต่ในปัจจุบันก็เห็นมีของ Number 9 ที่ใช้ WRAM
เช่นกัน ในรุ่น
Number 9 Revolutuon IV ที่ใช้ WRAM 8M บน Crad WRAM นี้โดยรวมแล้วก็เหมือน ๆ กับ VRAM จะต่างกันก็ตรงที่ มันรองรับ Bandwith
ที่สูงกว่า
อีกทั้งยังใช้ระบบ Double-Buffer อีกด้วย จึงทำให้มันเร็วกว่า VRAM อีกมากทีเดียว

DRAM
คือ เมโมรี่แบบธรรมดาที่สุด
ซึ่งความเร็วขึ้นอยู่กับค่า Access Time หรือเวลาที่ใช้ในการเอาข้อมูลในตำแหน่งที่เราต้องการออกมาให้
มีค่าอยู่ในระดับนาโนวินาที (ns) ยิ่งน้อยยิ่งดี เช่น ชนิด 60
นาโนวินาที เร็วกว่าชนิด 70 นาโนวินาที เป็นต้น รูปร่างของ DRAM
เป็น SIMM
8 บิต (Single-in-line
Memory Modules) มี 30 ขา DRAM
ย่อมาจาก Dynamic
Random Access Memory

Fast
Page DRAM
ปกติแล้วข้อมูลใน DRAM
จึงถูกเก็บเป็นชุด
ๆ แต่ละชุดเรียกว่า Page ถ้าเป็น Fast
Page DRAM จะเข้าถึงข้อมูลได้เร็วกว่าปกติสองเท่าถ้าข้อมูลที่เข้าถึงครั้งที่แล้ว
เป็นข้อมูลที่อยู่ใน Page เดียวกัน Fast
Page DRAM เป็นเมโมรี่ SIMM
32 บิตมี 72ขา
(Pentium มีดาต้าบัสกว้าง 64 บิตดังนั้นจึงต้องใส่ SIMM
ทีละสองแถวเสมอ)

EDO RAM
EDO Ram นำข้อมูลขึ้นมาเก็บไว้ใน Buffer
ด้วย เพื่อว่า
ถ้าการขอข้อมูลครั้งต่อไป เป็นข้อมูลในไบต์ถัดไป จะให้เราได้ทันที EDO
RAM จึงเร็วกว่า Fast
Page DRAM ประมาณ 10 %
ทั้งที่มี Access Time เท่ากัน เพราะโอกาสที่เราจะเอาข้อมูลติด ๆกัน มีค่อนข้างสูง EDO มีทั้งแบบ SIMM
32 บิตมี 72 ขา
และ DIMM 64 บิตมี 144
ขา คำว่า EDO ย่อมาจาก Extended
Data Out

SDRAM
เป็นเมโมรี่แบบใหม่ที่เร็วกว่า EDO ประมาณ 25 %
เพราะสามารถเรียกข้อมูลที่ต้องการขึ้นมาได้ทันที
โดยที่ไม่ต้องรอให้เวลาผ่านไปเท่ากับ Access Time ก่อน หรือเรียกได้ว่า ไม่มี Wait
State นั่นเอง
ความเร็วของ SDRAM จึงไม่ดูที่ Access Time อีกต่อไป แต่ดูจากสัญญาณนาฬิกาที่ โปรเซสเซอร์ติดต่อกับ Ram เช่น 66, 100 หรือ 133 MHz
เป็นต้น SDRAM
เป็นแบบ DIMM
64 บิต มี 168
ขา เวลาซึ้อต้องดูด้วยว่า MHz ตรงกับเครื่องที่เราใช้หรือไม่
SDRAM ย่อมาจาก Sychronous DRAM เพราะทำงาน "sync" กับสัญญาณนาฬิกาบนเมนบอร์ด

SDRAM II (DDR)
DDR (Double Data Rate) SDRAM มีขา 184 ขา มีอัตราการส่งข้อมูลเป็น
2 เท่าของความเร็ว FSB ของตัว RAM คือ มี 2 ทิศทางในการรับส่งข้อมูล
และมีความเร็วมากกว่า SDRAM เช่น ความเร็ว 133 MHz คูณ 2 Pipline เท่ากับ 266 MHz

RDRAM
RDRAM หรือที่นิยมเรียกว่า RAMBUS
มีขา 184 ขา
ทำมาเพื่อให้ใช้กับ Pentium4 โดยเฉพาะ(เคยใช้กับ PentiumIII และ Chipset i820 ของ Intel
แต่ไม่ประสบผลสำเร็จเนื่องจากมีปัญหาเรื่องระบบไฟจึงยกเลิกไป)
มีอัตราการส่งข้อมูลเป็น 4 เท่าของความเร็ว FSB ของตัว RAM คือ มี 4 ทิศทางในการรับส่งข้อมูล
เช่น RAM มีความเร็ว BUS
= 100 MHz คูณกับ 4 pipline
จะเท่ากับ 400 MHz เป็นเมโมรี่แบบใหม่ที่มีความเร็วสูงมาก
คิดค้นโดยบริษัท Rambus, Inc. จึงเรียกว่า Rambus DRAM หรือ RDRAM อาศัยช่องทางที่แคบ แต่มีแบนด์วิทด์สูงในการส่งข้อมูลไปยังโปรเซสเซอร์
ทำให้ความเร็วในการทำงานสูงกว่า SDRAM เป็นสิบเท่า RDRAM
เป็นทางเลือกทางเดียวสำหรับเมนบอร์ดที่เร็วระดับหลายร้อยเมกกะเฮิร์ดซ์
มีแรมอีกชนิดหนึ่งที่ออกมาแข่งกับ RDRAM มีชื่อว่า Synclink
DRAM ที่เพิ่มความเร็วของ
SDRAM ด้วยการเพิ่มจำนวน bank เป็น 16 banks
แทนที่จะเป็นแค่
4 banks
อ้างอิง
ไม่มีความคิดเห็น:
แสดงความคิดเห็น